



联系人:李小姐
邮箱:3374945657@qq.com
电话:13651778053
地址: 上海浦东新区秀浦路3188弄创研智造园区C7-28号1楼
UIM620微型高性能步进电机控制驱动器-不带谐波
UIM6202/UIM6204/UIM6208 是专为机器人运动控制开发的微型高性能步进电机控制驱动器,提供了一种可靠,简单,便捷和微型化的机器人控制系统方案。除了具备UIM242系列控制驱动一体机的所有性能外,增加了以下功能:高速性3000-6000rpm,高转矩,PVT 3次样条运动插补,同步,12-48V宽电压输入,可接受36位多圈值编码器。其驱动和控制系统均封装在56x56x20mm的全金属壳体内,只需4根导线即可实现所有机器人运动控制。其控制指令和结构与ELMO的SimpleIO系列类似。
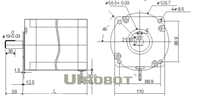
?外形57mmx57mmx20mm
?与电机一体化设计,亦可分立工作
?铝合金机壳,坚固耐用,便于扇热
电机驱动特性
?12-48v输入电压
?微步1-16细分。H桥双极恒流,在
线可控脱机/使能
?细分和电流控制,57电机转速
可达6000转/分钟
通讯特性
?主动CAN2.0B,全网仅用两根导线
?高1Mbps,远10Km通讯距离
?可联网闭环步进达100个
?差分总线,强抗噪特性
嵌入式DSP微处理系统
?高性能64位计算精度硬件DSP
?支持值编码器(增量式编码器可选),
实现自闭环控制
? JOG恒速控制,PTP点位控制,PVT3次样
条曲线运动插补
?60个电机控制器之间同步误差<4微妙
?用户编程,脱离上位机执行复杂插补运动
?4端口传感器输入
?4端口TTL电平输出,由三种事件或指令控
制
?15种事件实时状态变化通知
?10种传感器事件触发13种预设实时控制动
作
工作电气性能(环境温度25℃)
供电电压
|
12V ~ 40VDC
|
|
输出电流
|
峰值 4A / 8A 每相(用户指令可调)
|
|
驱动方式
|
恒相流PWM 控制
|
|
励磁方式
|
整步,半步,4 细分,8细分,16 细分
|
|
|
|
通讯方式(环境温度25℃时)
通讯协议
|
主动CAN2.0B(CAN2.0A可选)
|
|
物理连接
|
二线制,CANH,CANL,双绞线
|
|
CAN总线驱动
|
支持1百万比特率的运行速率,可连接节点100个
|
|
|
满足ISO-11898标准物理层要求
|
|
|
短路保护,高压瞬态保护,自动热关断保护
|
|
|
采用差分总线,具有很强的抗噪性能
|
使用环境及参数
冷却方式
|
自然冷却
|
|
使用场合
|
避免粉尘、油雾 及腐蚀性气体
|
|
使用温度
|
-40℃-85℃
|
|
使用湿度
|
<80%RH,无凝露,无结霜
|
|
使用振动
|
3GMAX
|
|
保存温度
|
-50℃-150℃
|
信号端口
端口
|
说明
|
|
A+/A-
|
步进电机的A相接线
|
|
B+/B-
|
步进电机的B相接线
|
控制端口
端口号
|
符号
|
说明
|
|
1
|
V+
|
工作电压正:24-48V电流
|
|
2
|
GND
|
工作电压负,即0V(工作电压正负极不可接错)
|
|
3
|
CANH
|
CAN总线的高位线
|
|
4
|
CANL
|
CAN总线的低位线
|
|
5
|
AG
|
工作电压负,即0V(工作电压正负极不可接错)
|
|
6
|
P1
|
I/O端口1
|
|
7
|
P2
|
I/O端口2
|
|
8
|
P3
|
I/O端口3
|
|
9
|
P4
|
I/O端口4
|
|
10
|
P5
|
5V/60mA功率输出
|





 13651778053
13651778053