




| 品牌 |
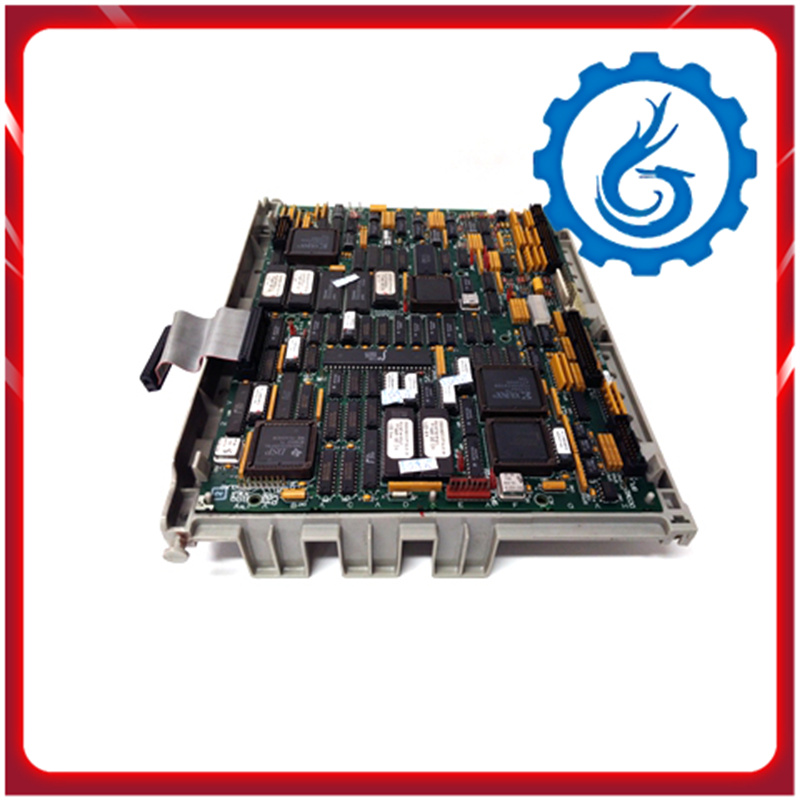
WOODWARD |
是否支持矢量图 |
是 |
| 适用范围 |
工业类 |
产地 |
瑞士 |
| 成色 |
全新 |
年份 |
2020 |
| 参数 |
9905-860 |
电压 |
24V |
| 输入电流 |
100-400A |
重量 |
2KG |
| 包装 |
完好 |
货期 |
库存 |
| 物流 |
顺丰 |
类型 |
模块 |
| 型号 |
9905-860 |
|
9905-860:集成时间E定义了PID控制器的集成时间。根据定义,积分时间是通过误差值增加输出所需的时间:误差值为恒定值,且为100%。?获得=1。?积分时间为1秒,表示在1秒内达到100%的变化。0.0=NOTSEL-禁用集成(控制器的I部分)。0.1 3600.0 =集成时间(秒)。调整程序见4001。定义PID控制器的派导时间。?您可以将错误的导数添加到PID控制器的输出中。导数是误差值的变化率。例如,如果进程错误值线性变化,则导数是添加到PID控制器输出的常数。?误差导数用一极滤波器进行滤波。滤波器的时间常数由参数4004 PID推导滤波器定义。0.0=NOTSEL-禁用PID控制器输出的误差导数部分0.1 10.0 =推导时间(秒)4004PID推导滤波器为PID控制器输出的误差导数部分定义滤波器时间常数。?在添加到PID控制器输出之前,误差导数是滤波器
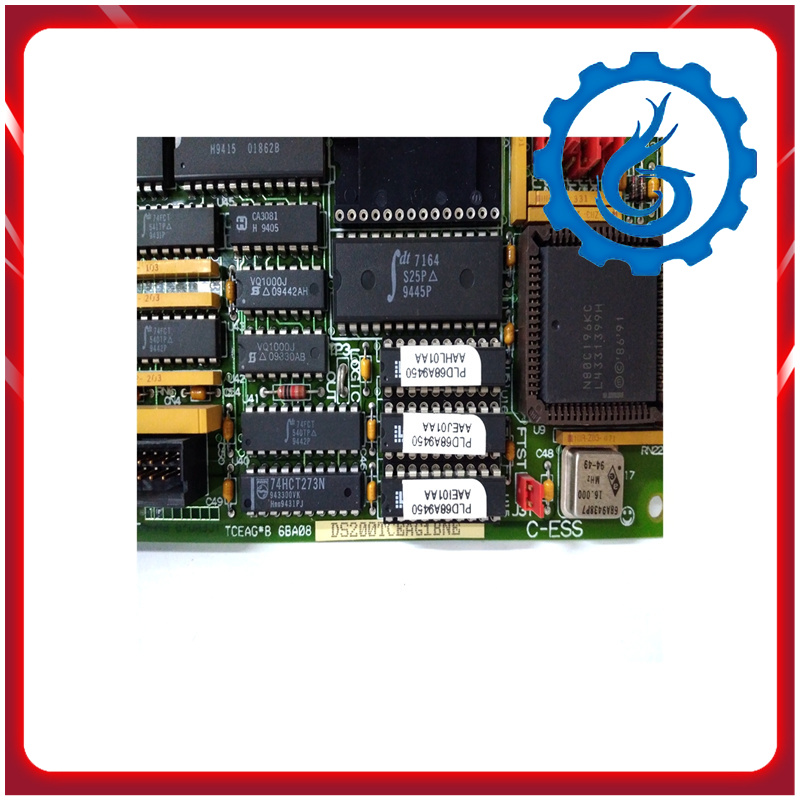
9905-860:PID控制器的实际值(PID1参数0128、0130和0132)。?单位和比例由参数4006和4007定义。4009 100 %的值定义(连同前面的参数)应用于PID控制器的实际值的缩放。?单位和比例由参数4006和4007定义。SEL定义了PID控制器的参考信号源。当PID调节器被旁路时,?参数没有显著性意义(见8121 REG旁路CTRL)。0=小键盘-控制面板提供参考。1=AI1-模拟输入1提供参考。2=AI2-模拟输入2提供参考。8=通信-现场总线提供参考。9=COMM+AI1-定义一个现场总线和模拟输入1(AI1)组合作为参考源。请参见下面的模拟输入参考校正。10=COMM*AI1-定义一个现场总线和模拟输入1(AI1)组合作为参考源。请参见下面的模拟输入参考校正。11=DI3U,4D(RNC)-数字输入,作为一个电机电位器控制,提供参考。?DI3增加了速度(U代表“up”)DI4降低了参考(D代表“down”)。?参数2205加速器时间2控制参考文献



 13600030409
13600030409