




联系人:毛文珍
邮箱:
电话:13817011982
地址: 中国 上海 浦东新区东高路680号
| 品牌 |
苞米勒 |
用途 |
车间使用 |
| 控制方式 |
系统 |
是否进口 |
进口 |
| 是否支持加工定制 |
支持 |
保质期 |
6个月 |
| 产品型号 |
BM5332-SG02-0100 |
USB接口数量 |
6 |
| 画面 |
高清 |
颜色 |
灰色 |
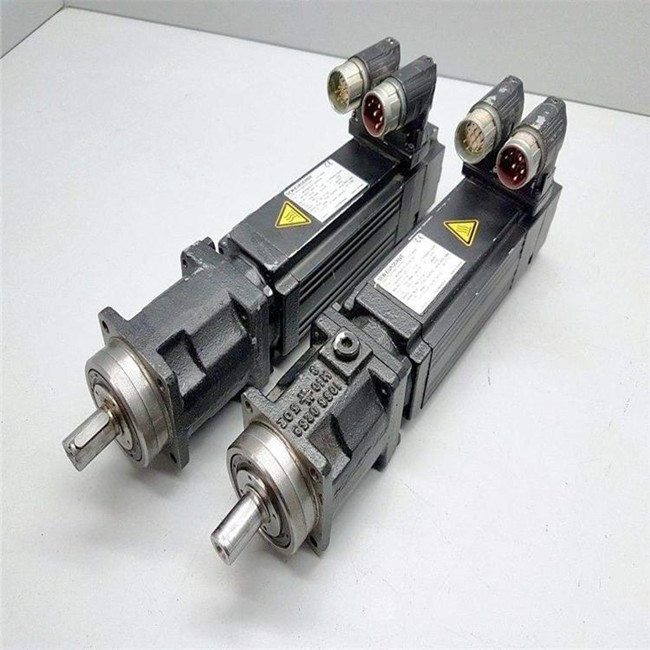
伺服驱动器是用来控制伺服电机的一种控制器,其作用类似于变频器作用于普通交流马达,属于伺服系统的一部分,主要应用于高精度的定位系统。

一般是通过位置、速度和力矩三种方式对伺服马达进行控制,实现高精度的传动系统定位,目前是传动技术的高端产品。

凸印机鲍米勒伺服驱动器维修:
P211:驱动管理程序故障160 =超时通信,161 =BACI通信选项模块的超时,162 =超时循环通信,163 =超时所需数据,164 =现场总线错误,165=控制器与外部信号不同步,166 =制动控制错误,167 =启动驱动器时没有松开抱闸,168 =停止驱动时没有关闭抱闸,169=保持制动状态错误(循环监控)170 =保持制动衬片错误,171 =初始化抱闸错误,172=抱闸错误:保持转矩不准,173-175=保留

二、电机在一个方向上比另一个方向跑得快
1)?故障原因:无刷电机的相位搞错。
处理方法:检测或查出正确的相位。
2)?故障原因:在不用于测试时,测试/偏差开关打在测试位置。
处理方法:将测试/偏差开关打在偏差位置。
3)?故障原因:偏差电位器位置不正确。
处理方法:重新设定。

三、电机失速
1)?故障原因:速度反馈的极性搞错。
处理方法:可以尝试以下方法。
a.如果可能,将位置反馈极性开关打到另一位置。(某些驱动器上可以)
b.如使用测速机,将驱动器上的TACH+和TACH-对调接入。
c.如使用编码器,将驱动器上的ENC A和ENC B对调接入。
d.如在HALL速度模式下,将驱动器上的HALL-1和HALL-3对调,再将Motor-A和Motor-B对调接好。
2)?故障原因:编码器速度反馈时,编码器电源失电。
处理方法:检查连接5V编码器电源。确保该电源能提供足够的电流。如使用外部电源,确保该电压是对驱动器信号地的。

四、LED灯是绿的,但是电机不动
1)?故障原因:一个或多个方向的电机禁止动作。
处理方法:检查+INHIBIT?和 –INHIBIT?端口。
2)?故障原因:命令信号不是对驱动器信号地的。
处理方法:将命令信号地和驱动器信号地相连。
五、上电后,驱动器的LED灯不亮
故障原因:供电电压太低,小于最小电压值要求。
处理方法:检查并提高供电电压。

六、当电机转动时,?LED灯闪烁
1)?故障原因:HALL相位错误。
处理方法:检查电机相位设定开关是否正确。
2)?故障原因:HALL传感器故障
处理方法:当电机转动时检测Hall A, Hall B, Hall C的电压。电压值应该在5VDC和0之间。

Baumuller鲍米勒伺服控制器系列
● BUS621、BUS622、BUS623、BUS624系列伺服器;
● BUM60、BUM61、BUM62、BUM63、BUM64系列伺服控制器;
● BUG622、BUG623、BUG3、BUG2、BUG20系列伺服电源;
● BUM616、BUM617、BUM618、BUM619系列伺服器;
● BUS6V、BUS3、BUS2系列伺服控制器;
● BKD6、BKF12、BKH63系列伺服器
● b maXX 1000系列● b maXX 4100系列● b maXX 2400系列● b maXX 4600系列● b maXX 2500系列● b maXX 5000系列● b maXX 3300系列● b maXX 5500系列● b maXX 4000系列


 13817011982
13817011982