




联系人:陈经理
邮箱:2953211304@qq.com
电话:13333969333
地址: 河南驻马店市泌阳县泌阳县南高速收费站500米路西
| 型号 |
MDJ-2803 |
加工定制 |
是 |
| 功率 |
6 |
用途 |
产品码垛 |
| 售后服务 |
一年 |
规格 |
定制 |
| 厂家 |
中意隆 |
|
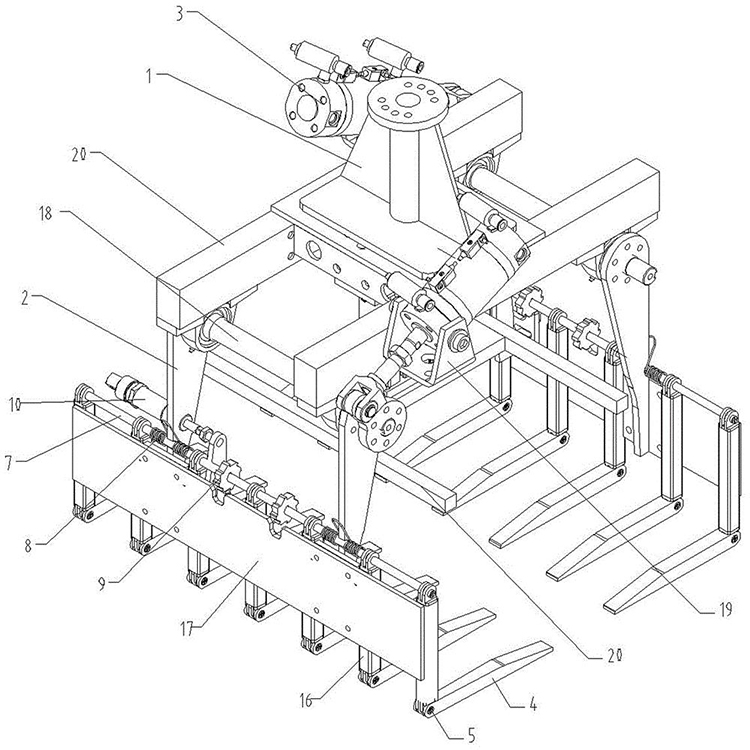
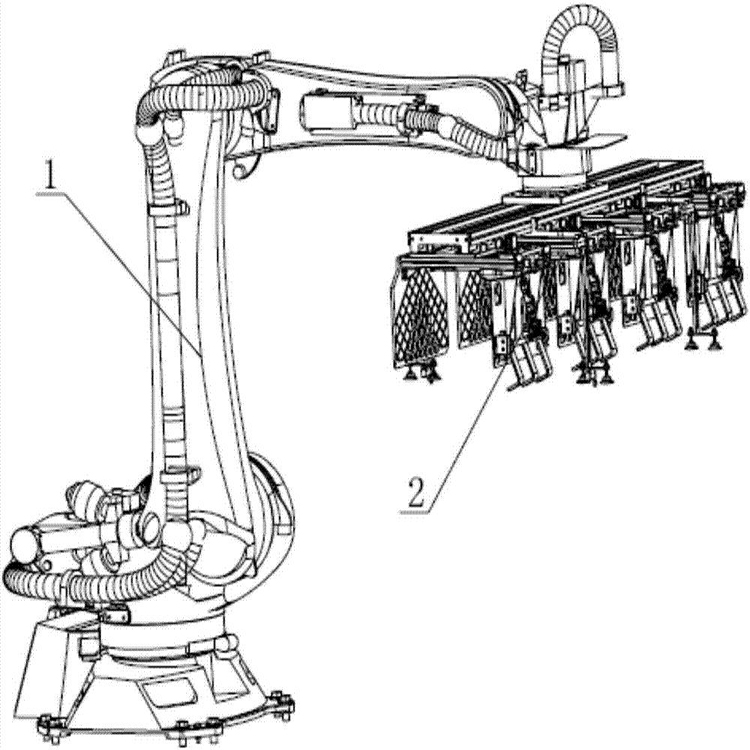
纸箱码垛机器人 全自动码垛机助力机械手 搬运机器人
纸箱码垛机器人的工作原理及其操作可以概括为以下几个步骤:
工作原理
识别与定位:
纸箱码垛机器人通过集成的传感器和视觉系统,如摄像头或激光测距仪,对纸箱的位置、尺寸和形状进行识别和定位。
这些传感器数据被传输到机器人的控制系统,用于计算的抓取和放置位置。
抓取与搬运:
机器人臂上的末端执行器(如吸盘、夹爪等)根据识别到的纸箱位置和形状,调整其姿态以适应纸箱的抓取。
末端执行器紧紧抓住纸箱后,机器人臂开始移动,将纸箱从生产线或存储区搬运到的码垛位置。
码垛与排列:
到达码垛位置后,机器人根据预设的码垛模式和层数,将纸箱地放置在位置。
机器人通过调整其臂的旋转和移动,确保纸箱以稳定、紧凑的方式堆叠,以提高存储效率和安全性。
循环与监控:
完成一个纸箱的码垛后,机器人返回至初始位置,准备抓取下一个纸箱。
整个过程在机器人的控制系统内循环进行,同时,系统不断监控纸箱的搬运和码垛过程,以确保准确性和效率。
操作步骤
初始化与设置:
启动机器人系统,并进行必要的初始化设置,如校准传感器、设置工作区域等。
根据纸箱的尺寸、形状和码垛要求,在机器人的控制系统中输入相应的参数。
启动自动模式:
在确认所有设置无误后,启动机器人的自动工作模式。
机器人将开始自动识别、抓取、搬运和码垛纸箱。
监控与调整:
在自动工作过程中,操作人员应持续监控机器人的工作状态和码垛效果。
如发现异常或需要调整码垛模式,可暂停机器人,进行相应的参数调整或故障排除。
结束与清理:
当完成所有纸箱的码垛任务后,关闭机器人系统。
对机器人臂、末端执行器和工作环境进行必要的清理和维护,以确保下次使用的顺利进行。









 13333969333
13333969333