



联系人:陈经理
邮箱:2953211304@qq.com
电话:13333969333
地址: 河南驻马店市泌阳县泌阳县南高速收费站500米路西
| 型号 |
ZYL-1408 |
自动化程度 |
全自动 |
| 加工定制 |
是 |
包装速度 |
14-20箱/分钟 |
| 电源 |
380 |
功率 |
6 |
| 设备类型 |
包装设备 |
产地 |
河南 |
| 类型 |
装箱机 |
厂家 |
中意隆 |
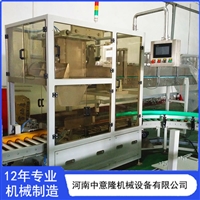
机器人自动装箱机 适用于易拉罐/瓶装饮料
机器人自动装箱机的工作原理及其操作流程可以概括为以下几个步骤:
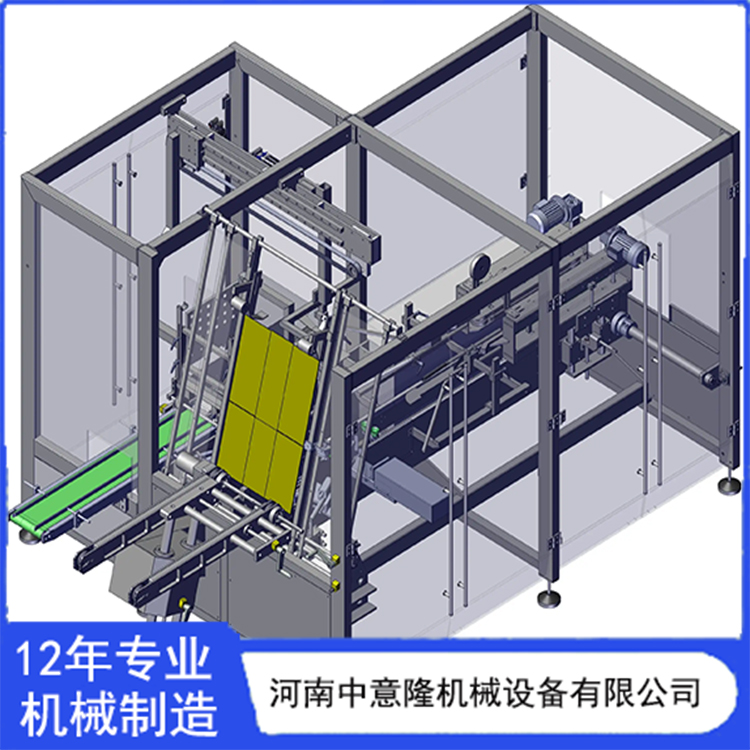
工作原理
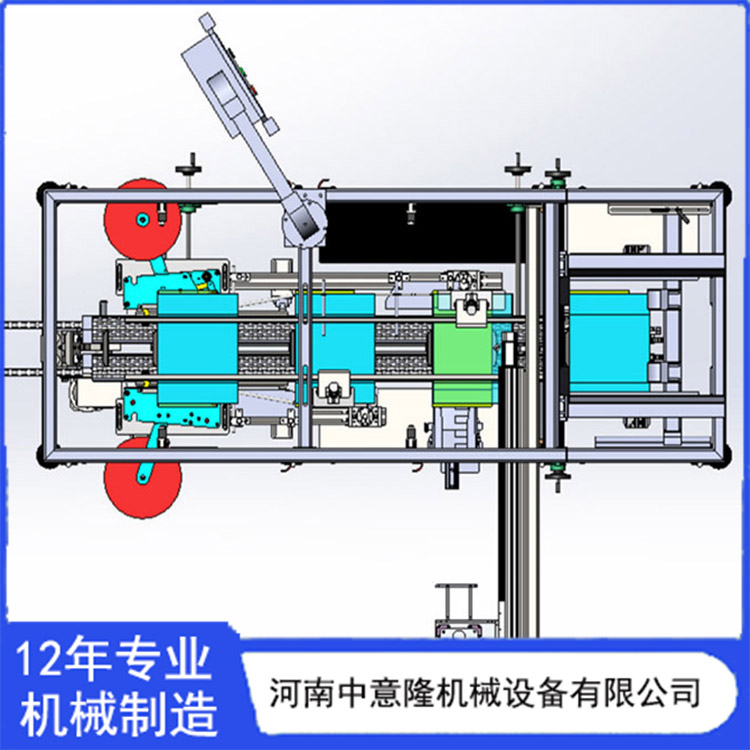
识别与定位:
机器人自动装箱机通常配备先进的视觉识别系统,该系统能够识别待装箱产品的形状、大小、位置等信息。
通过摄像头或传感器,系统能够定位每个产品在生产线上的位置,确保抓取时的准确性。
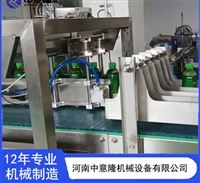
抓取与搬运:
机器人装备有灵活的机械臂和抓取装置,能够根据识别系统的指令,抓取位置的产品。
机械臂通过预设的路径或实时计算的路径,将抓取的产品搬运到的装箱位置。
排列与装箱:
在装箱过程中,机器人会根据预设的排列规则或算法,将产品按照一定的顺序和方式放入箱子中。
机器人能够自动调整抓取和放置的力度,以适应不同形状和材质的产品,确保装箱的紧密性和稳定性。
检测与反馈:
装箱完成后,机器人自动装箱机通常还会配备检测系统,用于检测装箱的完整性和准确性。
如果检测到任何问题,如产品错位、箱子未满等,系统会及时发出警报并提供反馈,以便操作人员及时处理。
操作流程
启动与初始化:
操作人员启动机器人自动装箱机,并进行必要的初始化设置,如选择装箱模式、设置产品参数等。
加载产品与箱子:
将待装箱的产品放置在的生产线上,并确保箱子供应充足。
启动装箱程序:
操作人员通过控制面板或远程控制系统启动装箱程序,机器人自动装箱机开始工作。
监控与调整:
在装箱过程中,操作人员需要密切关注机器人的工作状态和装箱效果。
如发现任何问题或异常,操作人员需要及时调整机器人的参数或干预处理。
完成装箱与输出:
当箱子装满后,机器人会自动将箱子输送到下一个工序或位置。
操作人员可以检查装箱质量,并根据需要进行后续处理,如封箱、贴标等。






 13333969333
13333969333