





联系人:马 .
邮箱:kanomax@fujita-cn.com
电话:19938139269
地址: 四川成都市金牛区成都市金牛区茶店子安蓉路8号4幢1单元2楼203号
| 品牌 |
Epson爱普生 |
型号 |
Epson C8-C1401S |
| 货号 |
Epson C8-C1401S |
类型 |
机器人 |
| 材质 |
机器人 |
|
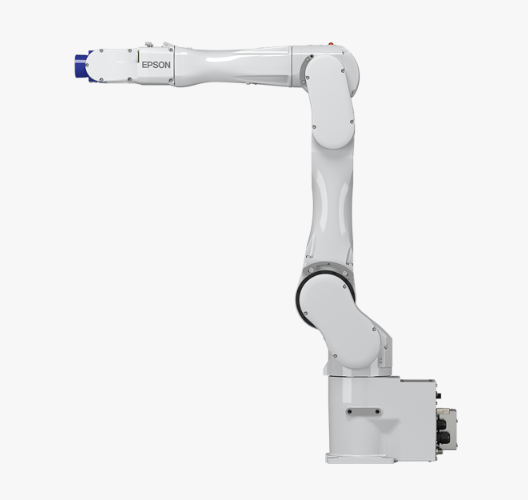
Epson C8-C1401S 爱普生C8XL 六轴机器人

基于 C4 机器人的成功经验,爱普生 C8XL 机器人保持了关键的纤细线性设计及 C4 机器人的高性能,同时提供了高负载和更大的操作距离。适合要求高灵活性、高速且狭小的占地面积的不同应用。爱普生 C8XL 长距离 6 轴机器人采用前沿的振动抑制,即:可感测角速度并将其反馈到伺服运动系统的爱普生石英微电子机械系统,可大幅减轻运动中和启动/停止过程中的振动,使运动更平稳,定位更快。
高性能
占地面积小,重量轻
负载高达 8Kg,且循环时间短
高重复定位精度,符合客户期待
振动抑制,确保快速运动和定位
纤细线性设计优势
占地面积小,保证厂房空间的使用率
重量轻,容易进行吊顶/侧壁安装和轨道/滑动安装
宽广的关节(±240 度)工作范围(比爱普生传统的6 轴机器人大约 30%)
适合有限的或狭小空间内的装载/下料
前沿的控制器和开发软件
爱普生 RC+ 软件简单易用、节省开发时间方面处于业界前沿
RC800-A 控制器以较低成本提供高性能
集成选项可优化系统性能,减少总开发时间(更多信息,请参阅选项页)
高性能且快速的处理能力
产品规格
| 产品型号 | C8-C1401S | |
| 轴臂长 | P点:通过J1-J5中心 | 1400.6 mm |
| J1-J6手腕法兰面 | 1480.6 mm | |
| 负载*1 | 额定值 | 3 kg |
| 值 | 8 kg | |
| 重复定位精度 | 第1-6关节 | ±0.05 mm |
| 标准循环时间*2 | 0.512 s | |
| 运动速度 | 第1关节 | 200°/s |
| 第2关节 | 167°/s | |
| 第3关节 | 200°/s | |
| 第4关节 | 480°/s | |
| 第5关节 | 450°/s | |
| 第6关节 | 720°/s | |
| 允许惯性力矩*3 | 第4关节 | 0.47 kg·m2 |
| 第5关节 | 0.47 kg·m2 | |
| 第6关节 | 0.15 kg·m2 | |
| 安装环境 | 标准型 | |
| 安装方式 | 台面安装, 吊顶安装, 侧壁安装 | |
| 本体重量 (不含线缆重量) | 标准型/洁净*4+ESD(防静电)型*5 | 63 kg |
| 防护型(IP67) | 66 kg | |
| 适配控制器 | RC800-A | |
| 用户电路 | 15针(D-Sub模拟接口) 8针(RJ45接口) 6针(压力传感器) | |
| 用户气路 | 气管?6 mm x 2 :耐压0.59MPa(6 kgf/cm2] | |
| 电压 | AC200-240 V单相电 | |
| 功耗*6 | 2.5 kVA | |
| 线缆长度 | 标准/高柔:3 / 5 / 10 / 15 / 20 | |
| 安全标准 | CE , KCs, NRTL | |
备注:
*1:不要超负载使用。
*2: 循环时间基于桌面安装方式、额定负载加速模式下(水平300mm,垂直25mm),往返拱形运动的时间(速度行程坐标)。
*3:根据负载和末端执行器状态通过Inertia命令设置参数(参数计算方法参见使用说明书)。
*4:洁净度:符合ISO 4级(ISO14644-1)
*5:防静电机型的主要树脂部件使用导电材料或经过电镀处理。对于机器人手臂末端(安装工具的部分),我们已确认即使在标准条件下立即进行测量后,电位差为+5V以下。
*6:数据来源于爱普生实验室测试结果,因使用环境和设置的不同,与实际使用数据可能存在差异。
控制器

爱普生控制器 RC800-A
进一步降低执行各种应用的要求
提高传送带跟踪处理速度
压力板卡内置,实现无缝连接
控制器电池超长续航
控制器及其适配的机器人本体,安全标准符合 “ISO”和“NRTL”认证
| 产品型号 | RC800-A |
| 可控制轴的数量 | |
| 6轴AC伺服电机 | |
| 机器人控制器 | |
| 编程语言机器人控制软件 | Epson RC+ 8.0 |
| 关节控制 | 同时6关节控制 |
| 软件AC伺服控制 | |
| 速度控制 | PTP运动时:1-100%/CP运动时:实际设定速度 |
| 加/减速度控制 | PTP运动时:1-100%(自动设定加/减速度)/CP运动时:实际设定速度 |
| 定位控制 | |
| PTP(点到点) CP(连续轨迹) | |
| 内容存量 | |
| 对象大小:4MB
点数据区:1000点/文件 备份变量区:768KB (含管理表内存区) 约4000个变量 (随数组变量大小而变化) | |
| 外部输入/输出信号(标准) | |
| 安全I/O | 输入:5条冗余路径
输出:3条冗余路径 |
| 标准I/O | 输入:24
输出:16 |
| 实时I/O | 输入:4 |
| 压力传感器I/O | 输入:1 |
| 紧急停止输入连接器(标准) | |
| 急停 | 1端口 |
| 通信接口(标准) | |
| 以太网 | 1端口 |
| RS-232C | 可选 |
| 安全功能 | |
| STO*1 | √ |
| SS1*2 | √ |
| 安全I/O | √ |
| 安全功能 | 紧急停止开关/安全保护(SG)/安全门紧急停止/启
用/“低速程序验证功能中的速度监控(T1测试模式) (不超过250mm/秒)”/软轴限位/安全输出/SLS/SLP/ 安全输出/SLS/SLP |
| 其他防护功能 | 低功耗模式/动态制动/过载检测/扭矩异常检测/速度异常检测/位置偏差溢出监测/CPU异常检测*/速度偏差溢出监测/过热检测/
内存异样检测*/风扇异常检测(不包括无风扇的控制器)/继电器熔接检测/过电压检测/AC电压检测/温度异常检测 |
| 电源 | |
| AC 200-240V
单相50/60Hz | |
| 重量*3 | |
| 12kg | |
备注:
*1:安全扭矩关闭:切断电机电源。
*2:安全停止1:控制停止后转换到STO状态。
*3:控制器机身标有重量。运输或移动控制器时,请确认重量并注意不要在搬起控制器时伤到背部。同时要避免因为掉落而造成的夹伤或手、脚或其他身体部位受伤。Epson C8-C1401S 爱普生C8XL 六轴机器人







 19938139269
19938139269